QGyroscopeReadingclass represents one reading from the gyroscope sensor. 更多 …

The reading contains 3 values, measured in degrees per second that define the movement of the device around the x, y and z axes. Unlike
QRotationReading, the values represent the current angular velocity rather than a fixed rotation. The measurements are in degrees per second.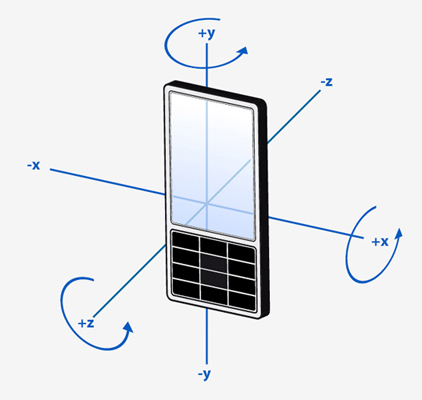
QGyroscopeReading
(
parent
)
¶
parent
–
QObject
PySide2.QtSensors.QGyroscopeReading.
setX
(
x
)
¶
x
–
qreal
Sets the angular velocity around the x axis to
x
.
另请参阅
PySide2.QtSensors.QGyroscopeReading.
setY
(
y
)
¶
y
–
qreal
Sets the angular velocity around the y axis to
y
.
另请参阅
PySide2.QtSensors.QGyroscopeReading.
setZ
(
z
)
¶
z
–
qreal
Sets the angular velocity around the z axis to
z
.
另请参阅